Baker link. Devによる外部マイコン書き込み
Baker link. Devは、外部マイコン書き込みをサポートしており、SWDデバックに対応している他のARM系CPUにRustのプログラムを書き込み可能です。
本節では、Baker link.Devを利用してRaspberry Pi PicoにRustプログラムを書き込む例に、外部マイコンへの書き込み方法を説明します。
開発環境
Baker link. Devで利用してきたBaker link. Envをそのまま利用することが可能です。 Baker link. Envを含めた環境構築については、環境構築を参照ください。
外部マイコンへの書き込み手順(Rasberry Pi Pico)
-
Baker link. Envを起動し、プロジェクト名、createクリック、プロジェクト保存先を選択すると、数秒後にVisual Studio Codeが開きます。
-
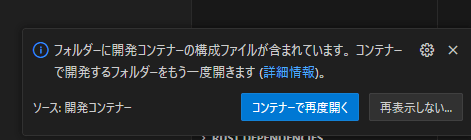
Visual Studio Codeの左下に表示される「コンテナ―で再度開く」をクリックしてください。すると、Dockerイメージのダウンロード&ビルド処理が開始されます。この処理が数分程度かかりますので、しばらくお待ちください。
- src/main.rsを開き、以下のプログラムに書き換えてください。
このプログラムは、Raspberry Pi PicoのUSB付近のLED(GPIO25)をON/OFFするプログラムです。
#![no_std] #![no_main] use defmt::*; use defmt_rtt as _; use panic_probe as _; use rp2040_hal as hal; use hal::pac; use embedded_hal::delay::DelayNs; use embedded_hal::digital::OutputPin; #[link_section = ".boot2"] #[used] pub static BOOT2: [u8; 256] = rp2040_boot2::BOOT_LOADER_GENERIC_03H; const XTAL_FREQ_HZ: u32 = 12_000_000u32; #[rp2040_hal::entry] fn main() -> ! { info!("Program start!"); let mut pac = pac::Peripherals::take().unwrap(); let mut watchdog = hal::Watchdog::new(pac.WATCHDOG); let clocks = hal::clocks::init_clocks_and_plls( XTAL_FREQ_HZ, pac.XOSC, pac.CLOCKS, pac.PLL_SYS, pac.PLL_USB, &mut pac.RESETS, &mut watchdog, ) .ok() .unwrap(); let mut timer = rp2040_hal::Timer::new(pac.TIMER, &mut pac.RESETS, &clocks); let sio = hal::Sio::new(pac.SIO); let pins = hal::gpio::Pins::new( pac.IO_BANK0, pac.PADS_BANK0, sio.gpio_bank0, &mut pac.RESETS, ); let mut led = pins.gpio25.into_push_pull_output(); loop { info!("LED on"); led.set_high().unwrap(); timer.delay_ms(2000); info!("LED off"); led.set_low().unwrap(); timer.delay_ms(2000); } }
- Baker link. EnvのRunをクリックしてください。するとバックグラウンドで、probe-rsのDAP Serverが起動します。

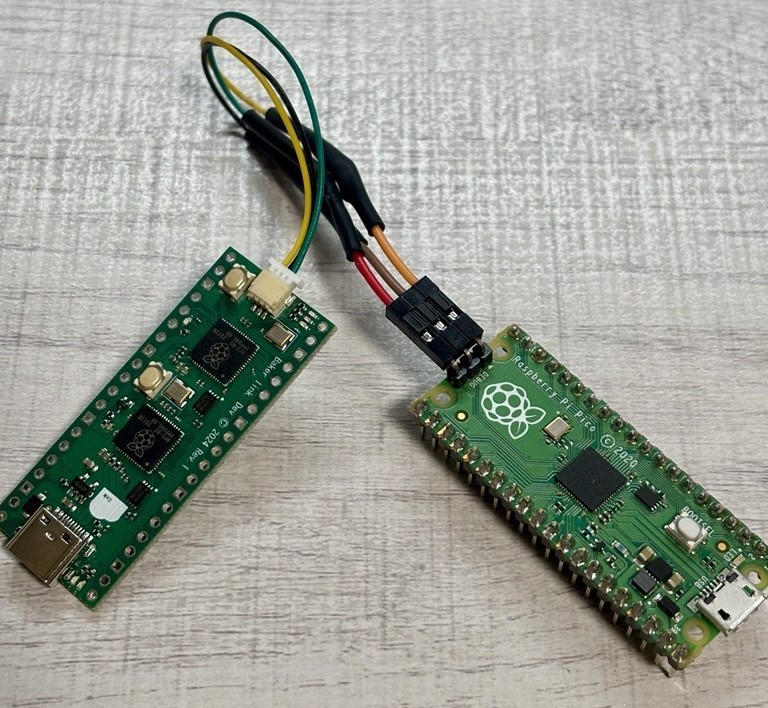
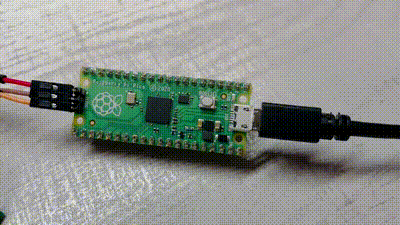
- Baker link. DevとRasberry Pi PicoをJST-SH型3ピンコネクタケーブルで接続してください。
販売しているBaker link. Dev Rev.1のSWDのピン配置は、販売時期によって以下のようにSWDのCLKとDIOの配置が逆転しています。これはストレートケーブルからクロスケーブル対応にBaker link. Devのファームウェアが変更されたためです。正常に通信がされない場合は、CLKとDIOの接続を逆にして接続することをお勧めいたします。
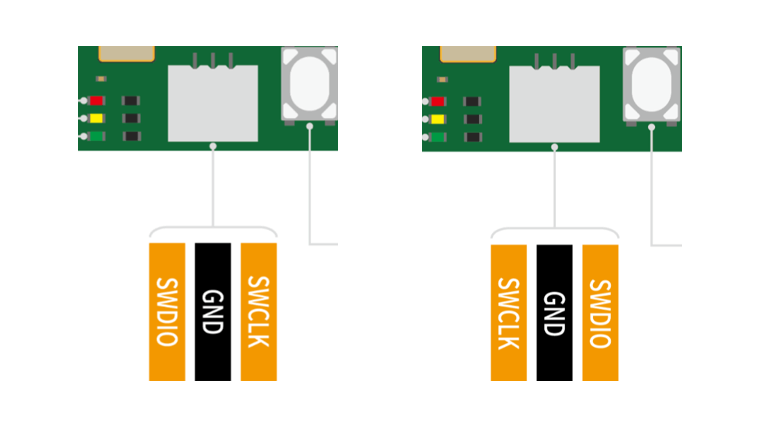
また配線で解決できない場合は、CLKとDIOが逆のバージョンのファームウェアをインストールすることも可能です。
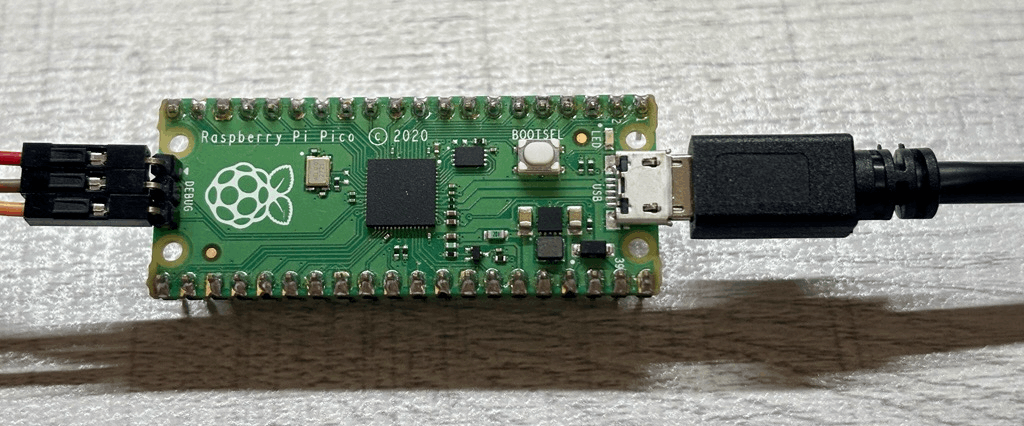
- Raspberry Pi Picoに電源を供給するために、Raspberry Pi PicoとPCをUSBケーブルで接続します。
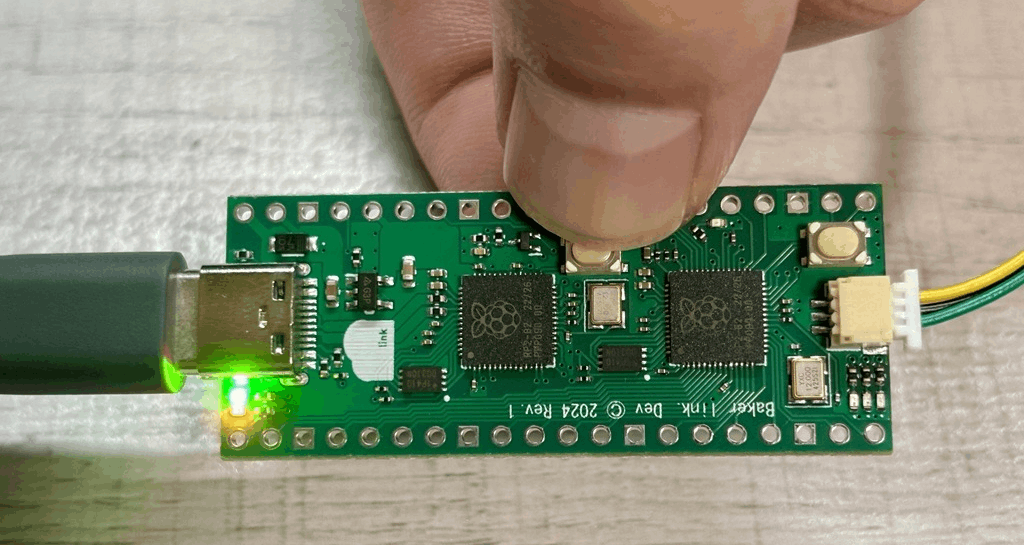
- 次のBaker link. Devを外部マイコン書き込みモードで接続するために、真ん中のボタンを押しながら、Baker link. DevとPCをUSBケーブルで接続してください。
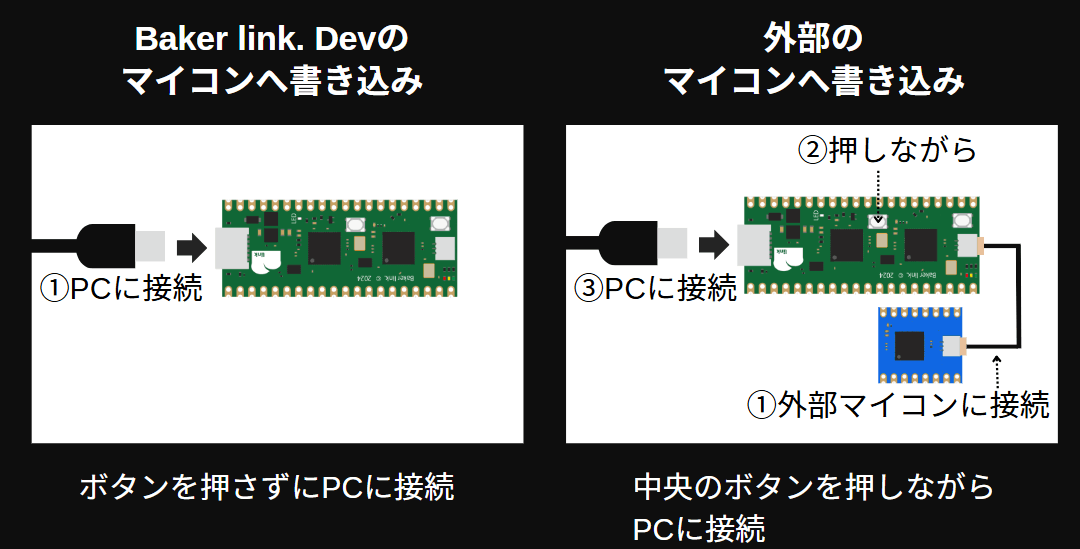
外部マイコン書き込みモードで接続されると緑のLEDが点灯します。
- Visual Studio CodeでF5キーを押してください。すると、以下のようなアイコンが表示されます。
- もう一度、F5キーを押すと、プログラムが動作します。
info!(...)のログが下の画面に表示されます。
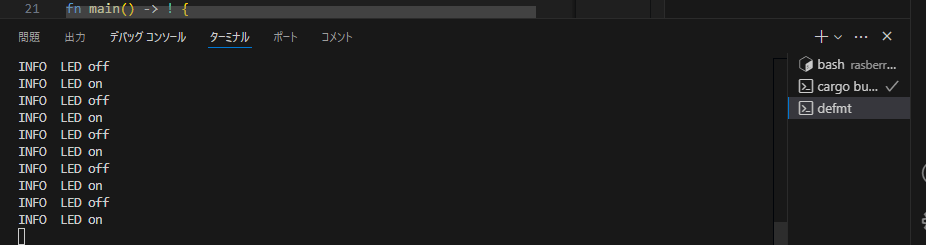
LEDも点灯されます。
この方法は、SWDデバックに対応している他のARM系CPUでも対応可能なので是非別のCPUでも試してみてください!